

GPM Core Observatory
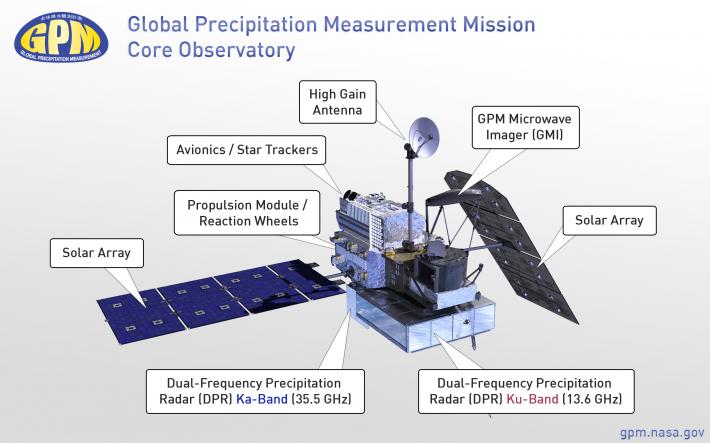
Diagram of the GPM Core Observatory
Carrying both a dual frequency radar instrument and a passive microwave radiometer, the Core Spacecraft serves as a calibration standard for the other members of the GPM spacecraft constellation.
The Core Spacecraft was developed and tested in-house at NASA Goddard Space Flight Center. The GPM Core Observatory orbit inclination of 65 degrees is such that it enables the orbit to cut across the orbits of other microwave radiometers, sample the latitudes where nearly all precipitation occurs, and sample at different times of day. The GPM Core Observatory GMI instrument science data is returned continuously by TDRSS-MA (TDRSS Multiple Access) link. Dual-frequency Precipitation Radar science data is returned by TDRSS-SA (TDRSS Single Access) link.
Satellite Details
Launch Date: 1:37pm EST, Febrauary 27th, 2014
Structural / Mechanical Subsystem
The Spacecraft Structural/Mechanical Subsystem provides the support structure for Observatory components. The support structure provides suitable orientation and field-of-view for payload instrument operation and locations for spacecraft bus components.
Solar Array Drive and Deployment Subsystem
The SADDS Subsystem provides the solar array, control of the solar array drive motor, and initial deployment of the solar panels.
High Gain Antenna Subsystem (HGAS)
The HGAS Subsystem provides gimbaled support for the High Gain Antenna directional pointing.
Thermal Control Subsystem (TCS)
The TCS maintains the Observatory thermal environment by means of active and passive control. The DPR and GMI to spacecraft interfaces are controlled to maintain proper sensor performance.
Power Subsystem
The Power Subsystem acquires solar power from the solar array, controls the recharge of the spacecraft battery, and distributes power to Observatory components through the power supply electronics.
Propulsion Subsystem
The Propulsion Subsystem provides the thrust capability to optimize the Observatory orbit after separation from the launch vehicle, provides orbit maintenance, corrects anomalous spacecraft attitude control rates if needed, and de-orbits the Observatory through a controlled atmospheric re-entry.
Guidance, Navigation and Control (GN&C) Subsystem
The GN&C Subsystem provides a stable attitude orientation for the Observatory within the accuracy and knowledge requirements needed for the instruments.
RF Communications (RF Comm) Subsystem
The RF Communications Subsystem provides S-Band radio frequency (RF) communications between the GPM Core Observatory and the GPM ground systems. The High Gain S-Band Antenna provides for continuous real time GMI and DPR science data transmission through the TDRSS Multiple Access (TDRSS-MA) service. The High Gain S-Band Antenna also provides for transmission of stored GMI and DPR science data and Observatory housekeeping status on a scheduled basis utilizing the TDRSS Single Access (TDRSS-SA) service. Contingency communications are provided by omni directional S-Band antenna links through NASA’s Near Earth Network (NEN).

Building the Core Observatory
at Goddard Space Flight Center.
Command and Data Handling (C&DH) Subsystem
The C&DH Subsystem performs Observatory command and control processing, providing control commands to the Observatory instruments and components. The C&DH Subsystem collects telemetry and data from the Observatory instruments and all components for processing and transmission to ground operations.
Safety/Mechanisms and Attitude Control (SMAC) Subsystem
The Safety/Mechanisms and Attitude Control (SMAC) Subsystem provides the generation of control signals and return status information for Observatory attitude sensors and actuators, HGAS and SADDS and operation and thruster operation through the Mechanisms, Attitude and Control Electronics (MACE), and the Propulsion Interface Electronics (PIE). The SMAC Subsystem provides the generation of control signals and return status information for Observatory HGAS and SAD deployment through the Deployment Firing Unit (DFU).
Electrical Harness
The Observatory Electrical Harness provides electrical interconnections for power, data, command and telemetry between Observatory components.
Flight Software
The Observatory Flight Software includes all programs, routines and symbolic languages that control the functioning of the Observatory and direct its operation.